十二自由度绳驱蛇形机械臂
发布时间: 2022-08-31
来源: 科技服务团
基本信息
合作方式:
技术转让
成果类型:
发明专利
行业领域:
电子信息技术
成果介绍
1.臂体分为两部分:前部和后臂,其中前臂部分使用绳驱串并联机构,以万向节作为机构的转动装置,灵活性较高,有利于管道衔接处的探测与操作;后臂长度约占臂体总长的三分之二,由9个平面转动自由度构成,有利于增加系统的跨度,减少系统的驱动数目。
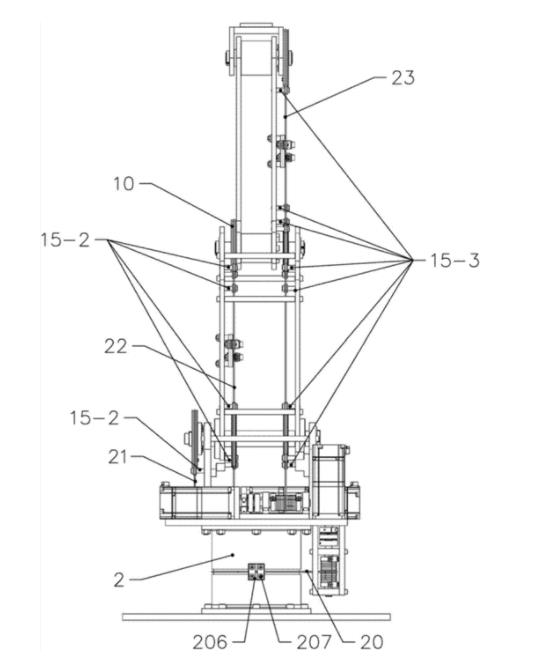
2.绳驱机械臂由臂体、控制柜、操作台等部分构成,机械臂臂体由多个串联关节组成,并使用绳索并联驱动,用于模拟生物体的肌腱作用,具有多个冗余自由度,形成复杂的集体形态,有利于避障;
3.驱动基座集中安装有绳驱模块,可用于同时驱动多条绳索运动。电控柜集中安装有机构的控制器、电机驱动器和传感器数据采集模块等负责机械臂的电控,完成笛卡尔空间下末端轨迹跟踪控制,实现大范围运动控制。
成果亮点
十二自由度绳驱蛇形机械臂主要针对飞机油箱内部探测与操作任务,通过蛇形机械臂,实现模块化,高度灵活,达到灵巧避障,适用于多种狭小复杂环境,臂体轻巧、刚柔特性易于控制。此项目与同类产品的竞争优势如下:
1.该方案具有超冗余自由度特点、易扩展且质量轻等优点。
2.前臂部分使用绳驱串并联机构,以万向节作为机构的转动装置,灵活性较高,长度约占整个臂体的三分之一,自由度为12个,可以形成极高的弯曲曲率,有利于管道衔接处的探测与操作;
3.通过拉力控制器以绳长状态量作为反馈,引入非线性动力学项,可实现系统的整体线性化。
4.机械臂的臂体和驱动装置中安装有绳索的自动预紧机构,用以实现对其初始预紧力的调节。通过丝杠驱动的移动滑台,可以实现机械臂在油箱开口长轴方向的运动。
团队介绍
哈尔滨迅动科技有限责任公司成立于2018年8月6日,是一家致力于机器人、计算机、机械设备、电气设备、图文设计、模型设计等应用软件的设计开发、技术服务于一体的高科技企业,主要产品主要有自稳定绳驱蛇形机械臂、十二自由度绳驱蛇形机械臂、卫星导航相关计算、显示软件,空间机器人,航天器数字孪生仿真验证平台等,联合哈尔滨工业大学、河北工业大学、武汉大学、西北工业大学等专业结构和研发实验室,利用雄厚的研发和制造能力,力求采用先进的设计理念,实用的功能性方案,攻克现有技术难题,促进行业发展。
成果资料
产业化落地方案
成果综合评价报告
评价单位:“科创中国”黑龙江产业振兴区域科技服务团 (黑龙江省科学技术协会) 评价时间:2022-09-13

 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号