高精度 360°三维扫描仪
发布时间: 2021-12-17
基本信息
合作方式:
合作开发
成果类型:
发明专利
行业领域:
新一代信息技术产业,信息传输、软件和信息技术服务业
成果介绍
成果简介:
本成果结合“多频光栅编码”和“双目测量”两大概念,围绕“三维信息的高精度重构”及“三维点云的高效处理”关键科学问题,发展基于时间相位展开的高精度相位恢复法、基于双目极线约束的高精度相位匹配、高动态范围场景轮廓提取等关键技术,实现复杂面型、反光面型、多目标场景的高精度三维成像。
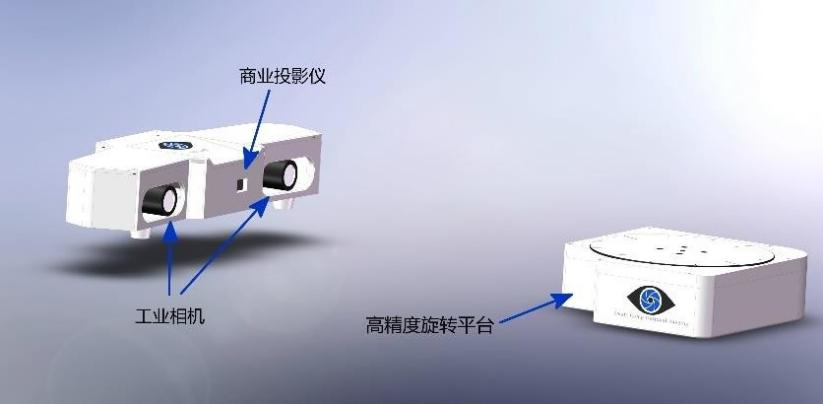
本仪器可满足 300mm×200mm 范围内,误差小于 40 微米,360 度全景的高保真三维轮廓获取。本成果硬件部分由三维形貌测量机(包括商业投影仪和工业相机) 与高精度旋转平台组成。其特色功能包括:
(1)单面三维数据重建:高速并行的相位计算、展开与三维轮廓重建;
(2)全景三维数据重建:获取场景不同角度的三维数据,进行三维点云自动拼接;
(3)三维数据优化:全局点云去噪、修剪、三角化、快速读取和保持等;
(4)支持 windows 7,64 位操作系统;
(5)导出三维模型为多种格式,输出接口广泛,测量结果可与多种逆向工程软件自由交换数据。
技术指标:
高密度点云数据:1,200,000 点云重建单面测量范围:400mm×300mm
单幅测量时间:小于 3 秒
测量精度:优于 40 微米
项目水平:□国际领先■国际先进□国内领先□国内先进
成熟程度:□原理■样机□小试□中试□产业化
合作方式:合作开发
成果亮点
团队介绍
成果资料
 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号