磁性螺旋形游动微机器人
发布时间: 2022-11-14
来源: 科技服务团
基本信息
合作方式:
技术许可
成果类型:
发明专利
行业领域:
电子信息技术,微机器人
成果介绍
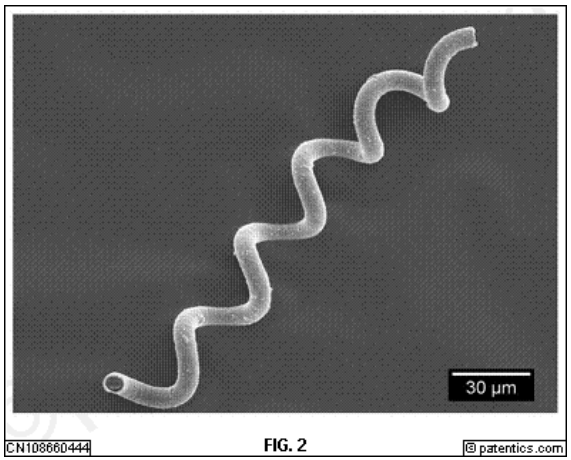
该项目研发出一种磁性螺旋形游动微机器人,其制备方法包括:选取螺旋藻生物模板、固定强化、胶态钯活化、解胶、化学镀镍、清洗烘干;螺旋藻生物模板的结构参数与用户所需磁性螺旋形游动微机器人的结构参数相同。该机器人操控系统包括:线圈部、容器平台、三个驱动器、三个直流电源、数字量模拟量转换装置、上位机以及观测记录装置等。
成果亮点
仿照大肠杆菌等微生物通过鞭毛旋转产生推进的运动方式,在三维可控旋转磁场控制下能够在低雷诺数环境中进行有效推进运动。
采用具有天然微螺旋结构的螺旋藻细胞作为模板,采用优化的化学镀工艺进行表面磁性化修饰,表面镀层均匀致密,形状结构保持良好,制造工艺简单,能够实现不同结构参数的磁性螺旋形游动微机器人的可控化、批量化制备。
操控系统基于三维亥姆霍兹线圈,通过上位机的软件程序控制,采用数字量模拟量转换装置和驱动器进行电流输出,产生三维可控旋转磁场,整个操控系统结构简单紧凑,集成度高,操作便捷灵活,能够实现磁性螺旋形游动微机器人的精准操控。
团队介绍
来自北京航空航天大学,可为本项目的研究开展提供良好的研究工作条件。项目的研究团队由教授、青年教师、博士生和硕士生等人员组成,团队负责人多年从事相关方面的科研与教学工作,负责完成过科技重大专项课题等以及横向合作等多项课题的研究工作。团队人员构成合理,技术基础好,研发能力强,为本项目的研究开展提供了良好的人员保障。
成果资料
产业化落地方案
 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号